

AFFILIAZIONE
università di pisa – dipartimento di ingegneria dell’informazione
AUTORE PRINCIPALE
Dr. Fortunato Gabriele Maria
VALUTA IL CHALLENGE[ratingwidget]
GRUPPO DI LAVORO
Dr. Fortunato Gabriele Maria – università di pisa – dipartimento di ingegneria dell’informazione, pisa
AREA TEMATICA
Applicazioni innovative di bioingegneria (premio miglior tesi di dottorato)
ABSTRACT
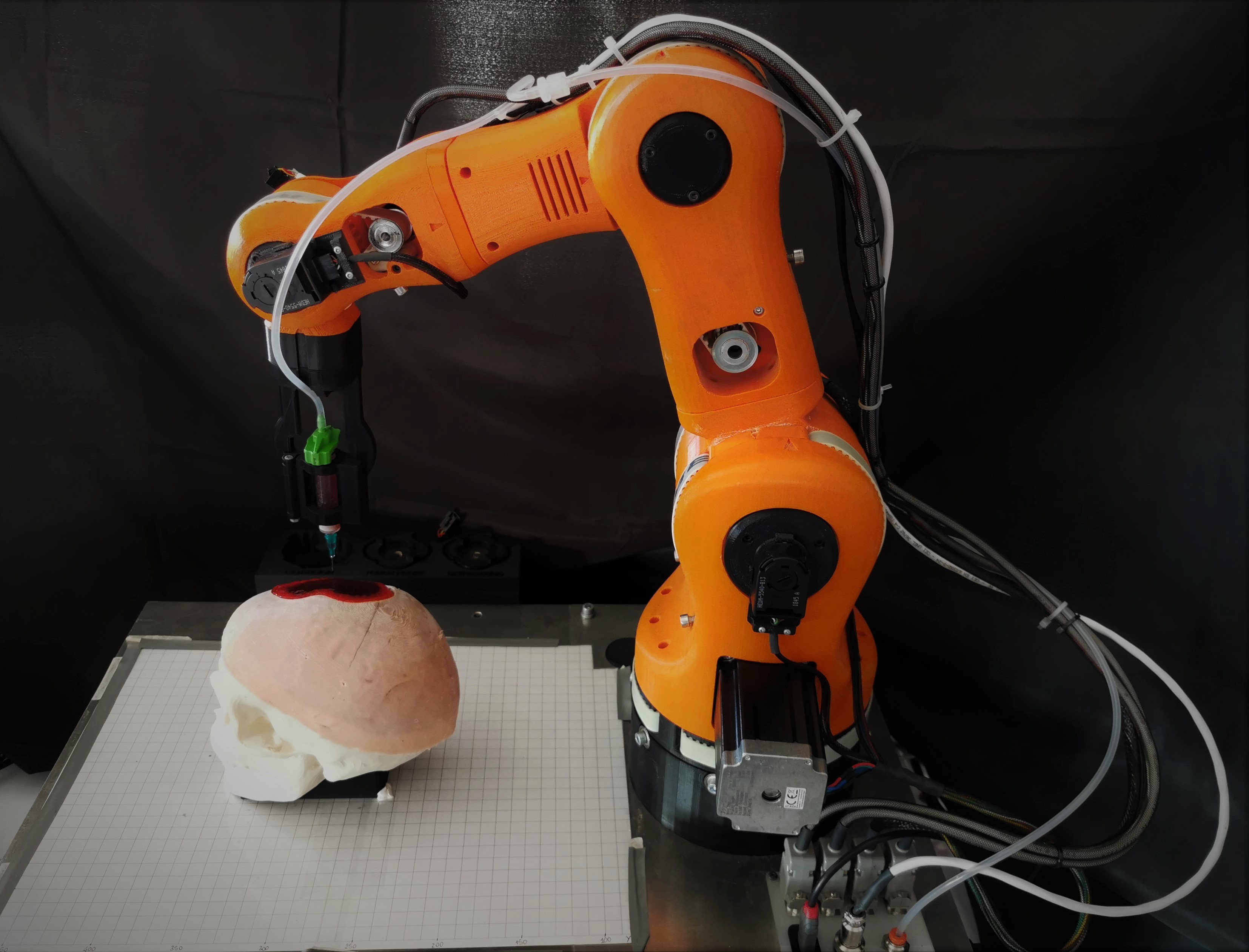
Il progetto di ricerca riguarda lo sviluppo di una soluzione innovativa nell’ambito dell’ingegneria tessutale e della medicina rigenerativa: il bioprinting in situ. Questa tecnologia consiste nella diretta deposizione di biomateriali sul paziente per la rigenerazione di tessuti e organi danneggiati. Il vantaggio rispetto all’approccio tradizionale è utilizzare il corpo del paziente stesso come bioreattore per la maturazione del costrutto artificiale, ottenendo una perfetta integrazione con il tessuto nativo. L’approccio più promettente è quello basato su braccio robotico, in quanto consente una deposizione precisa e controllata anche nei difetti anatomici più complessi. Per questo motivo, il primo obiettivo del progetto è stato quello di definire un workflow operativo standard per una procedura di bioprinting in situ articolato in 4 step successivi: scansione del difetto e creazione modello digitale, pianificazione della traiettoria di stampa per la rigenerazione, registrazione/localizzazione del paziente nell’area operativa, deposizione del biomateriale in situ. Per validare il workflow proposto, è stato progettato e fabbricato un braccio robotico (IMAGObot) per valutarne le potenzialità e i limiti in questo ambito di ricerca. Il robot è stato realizzato per utilizzare molteplici tool, tra cui un sistema di stampa ad estrusione ed uno di scansione dei difetti in grado di acquisire sia le proprietà geometriche che meccaniche dei tessuti scansionati. Questo consente di pianificare le traiettorie in modo più preciso, potendo utilizzare diversi biomateriali a seconda del tessuto biologico target. L’algoritmo di pianificazione delle traiettorie è stato invece sviluppato in Matlab e consente la determinazione del percorso di stampa sul difetto anatomico a partire dalla superficie del difetto. IMAGObot è stato quindi validato in uno scenario simulato seguendo tutti gli step del workflow operativo. É stato realizzato un phantom con un difetto cranico e utilizzando il braccio robotico è stata acquisita la geometria e le proprietà del difetto che è stato in seguito rigenerato mediante bioprinting in situ basato su tecnologia ad estrusione utilizzando diversi idrogel a seconda dei tessuti coinvolti. I risultati ottenuti hanno mostrato che l’approccio robotico per il bioprinting in situ è molto promettente per la medicina rigenerativa e potrà presto diventare un valido ausilio per il chirurgo permettendo, inoltre, un più rapido recupero del paziente.

